 |
Overview
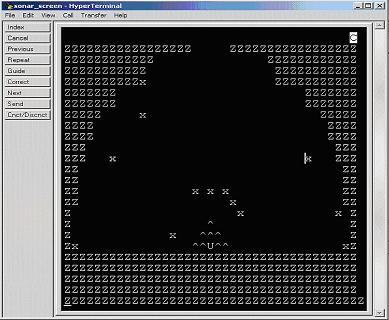
The Rover is a machine that scans a 180 degree range with redundant infrared and ultrasonic sensors and communicates that information back to a user at the Hyper Terminal. The user can then move the Rover with a Nintendo controller based on the current map of obstacles.
|
| Control An NES-8 controller was used to drive DC motors on the Rover via H-Bridge pulse-width modulation (PWM). Every directional pad combination was implemented to provide maximum control over the Rover, including zero-radius turns. For extra speed, the 'B' button provided 'turbo' mode. The 'start' button turned off power to the rover, but saved the state and allowed scanning and driving to resume when pressed again. |
|
|
|
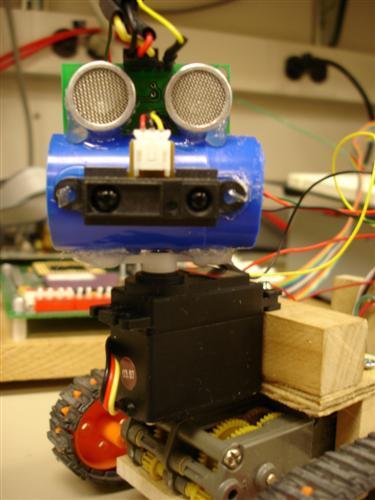
Feedback Redundant Infrared and Ultrasonic sensors were mounted onto a PWM-controlled servo motor. This allowed a constant 180 degree sweep of distances in front of the rover. Sensor information was routed to the HyperTerminal Window and displayed as a radar screen with the input sensor chosen via the NES 'select' button.
|
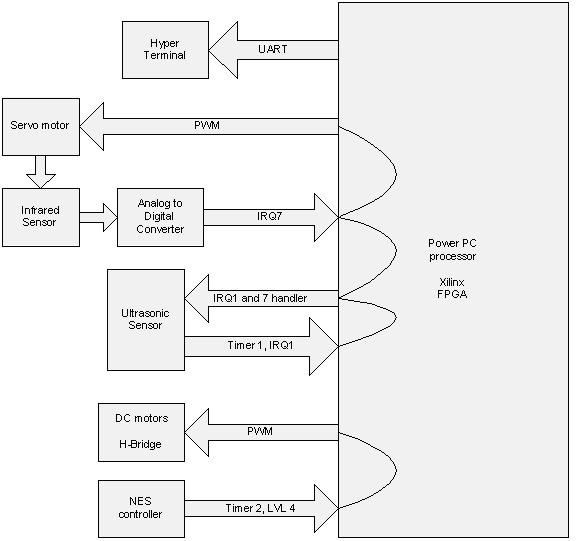
| Technical Overview
|
|