|
R.O.B.(Remotely Operated BOB)
EECS 373 W'08 |
|
R.O.B.(Remotely Operated BOB)
EECS 373 W'08 |
Team Members:Vishnu Desaraju (rajeswar)
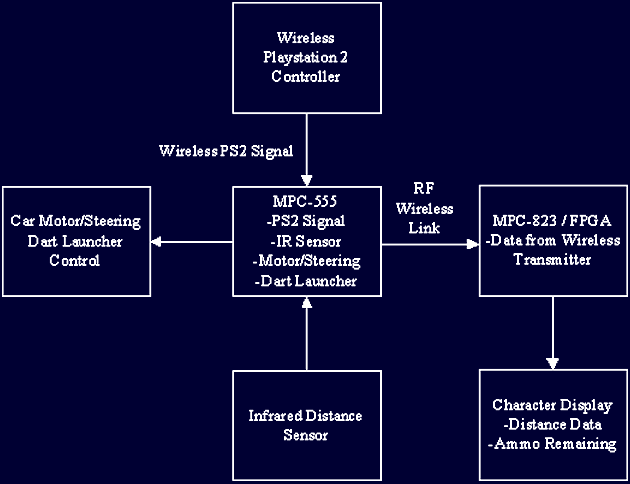
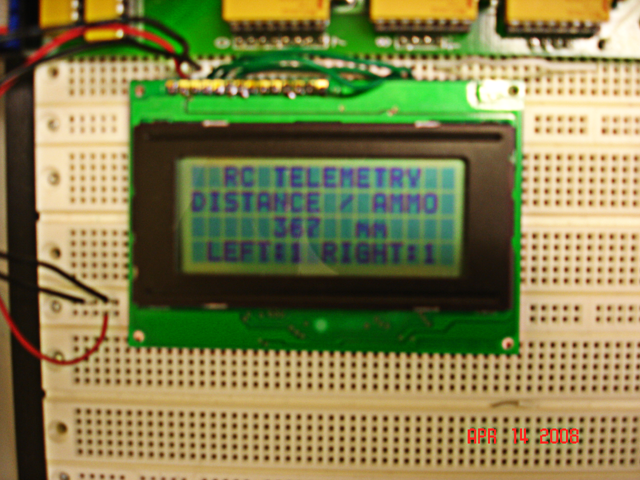
___________________________________ Introduction:Our project idea was to design a remote controlled car that can fire darts from a movable launcher and also sense the distance to any object in front of it. Sensor and current payload data is sent back to the base station (the MPC-823 processor and Spartan-3 FPGA) using a wireless serial link. The base then displays the distance and the dart count on a character display.
___________________________________ Member Task Distribution:
Vishnu Desaraju
Bobby Li
Honie Lui
Zane Salim High Level Design:
Block Diagram
Infrared Distance Sensor RF Wireless Link Servos Character Display Wireless Playstation 2 Controller: Car Motor: Hardware Design:
Infrared Distance Sensor
RF Wireless Link
Servos
H-Bridge and Motor
Character Display The 3 control pins were RS, R/W, and E. The write enable for these 3 was wired to Vdd since we would always be driving these pins. RS and R/W were latched by the display on the rising edge of E and the data pins were latched on the falling edge of E. Therefore, the setup and hold times of RS, R/W and data were important, as well as the pulse width of E. We took the times given to us by the spec and doubled them to absolutely make sure we fulfilled the requirements. Our character display also used the busy flag. To do this, we had to change the write enable on the expansion board to be controlled by DIR instead of the switches. A wire was placed between one of the expansion board outputs and the DIR input to switch the write enable on and off.
PS2 Controller
Dart Launcher and Project Integration Software Design:
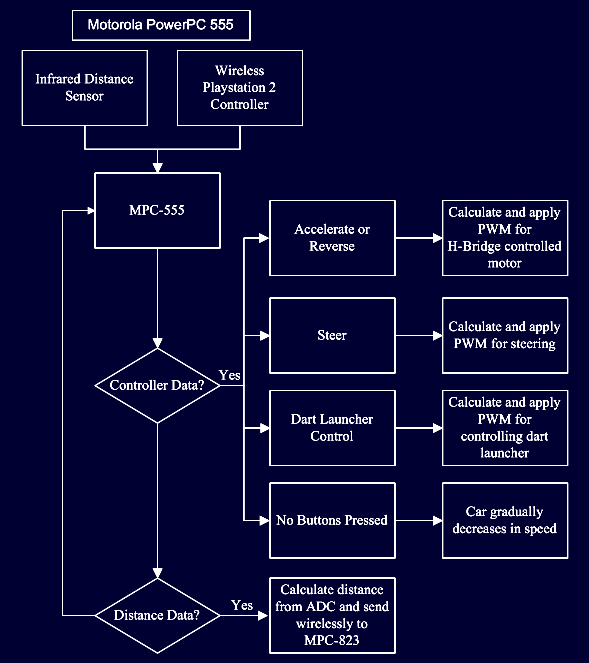
MPC-555
Wireless PS2 Controller
Distance Sensor and Wireless Link- 555 Side
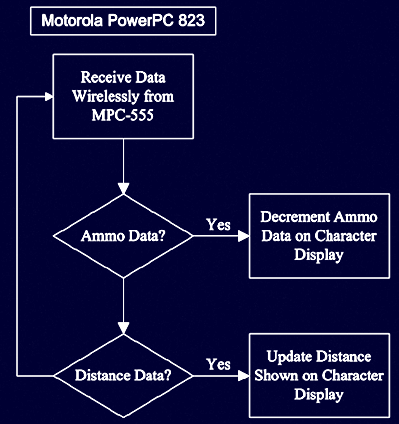
MPC-823
Wireless Serial Link - 823 Side
Character Display Results:We were very happy with the overall results from our project. All the components worked as expected independently and also after integration. The following are some interesting observations from a design and integration perspective:
Power We also had to use several voltage regulators to power the sensor, servos, and motor at 5 V (the MPC-555 has a built in voltage regulator, so we didn't need to provide one). The reason why we needed multiple regulators is that each regulator apparently only passed up to 1 A reasonably. Initially, when we drew more than an amp from the 5 volt regulator, our car would yield unexpected behavior, such as the dart launcher moving on its own, and the controller losing functionality (it's like the car had a mind of its own!). We were drawing about 2.2 A when fully integrated, not counting the processor. So we used each regulator to provide 5 V and about 0.8 A - 1.0 A for two or three devices. It would have been helpful to reduce the number of circuit boards to make our car lighter, but it was not critical.
MPC-555 Programming
Wireless Link
Distance Sensor
PS2 Controller
Steering
___________________________________ Conclusions:Overall, our project turned out the way we were hoping it would. We were able to design, build, and run R.O.B. without making many significant changes to our original project proposal. The MPC-555, MPC-823, and Spartan-3 provided more than enough processing power. However, as mentioned above, our final design was low on battery power, which limited R.O.B.'s mobility. If asked to redo the project, we would be sure to check the power specifications of our hardware and get batteries capable of meeting those needs. We would also distribute the work more evenly earlier in the project so that no one person becomes the sole knowledge-base for a component. Media:
Pictures MPC-555 before connecting everything:
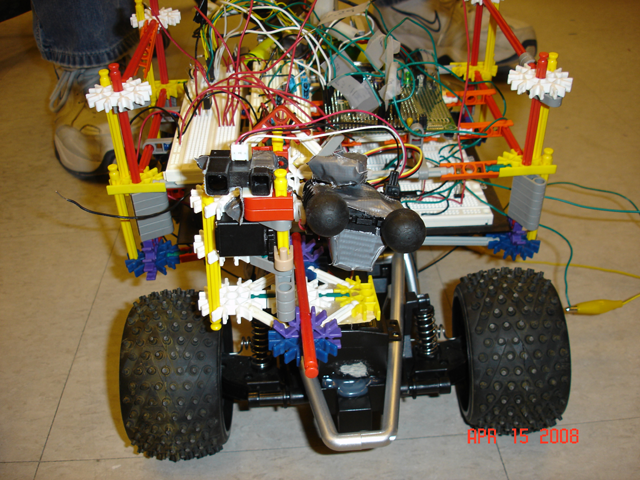
R.O.B. on the ground:
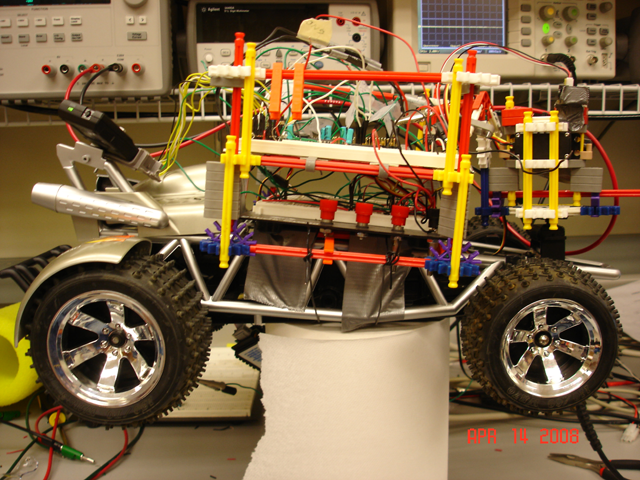
Side view of K'nex "parking structure":
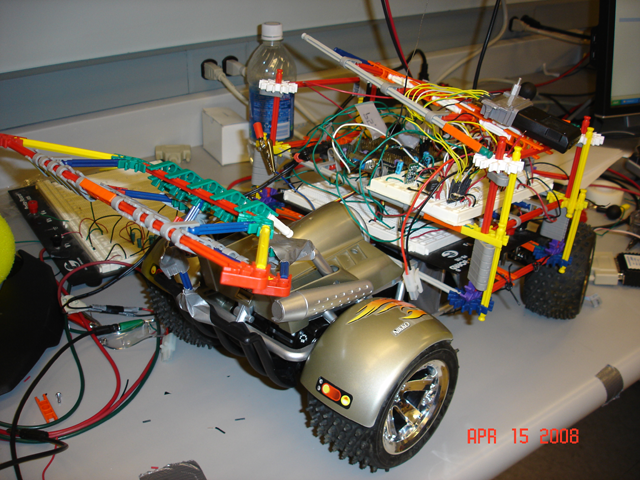
Spoiler and wiring chaos:
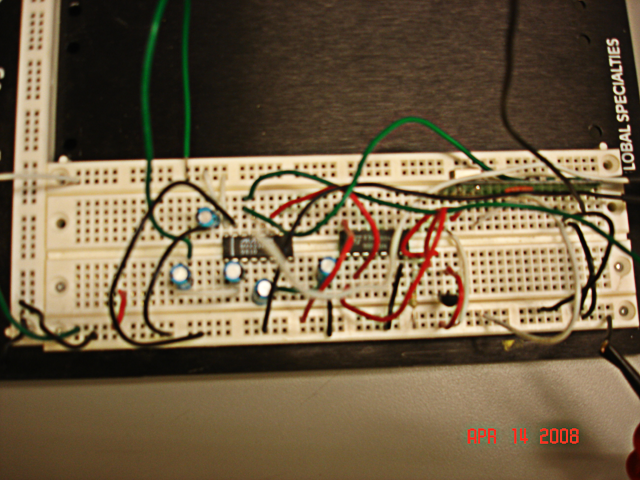
One end of the Wireless Link:
Character Display:
Videos References:
MPC-555 Processor MAX232CPE (Serial Voltage Conversion) H-Bridge (Motor Control / Current Buffer) Infrared Distance Sensor RF Wireless Link Character Display PS2 Controller |
University of Michigan |