 |
 |
 |
| (view 1, 6.0 Mb) | (view 2, 7.4 Mb) | (view 3, 7.0 Mb) |
| IEEE TAC Technical Note Submission Supplemental Material |
| MPEG Movies of starting from a stop; increasing walking rate to 0.8 m/s and then slowing to a stop | ||||||
|
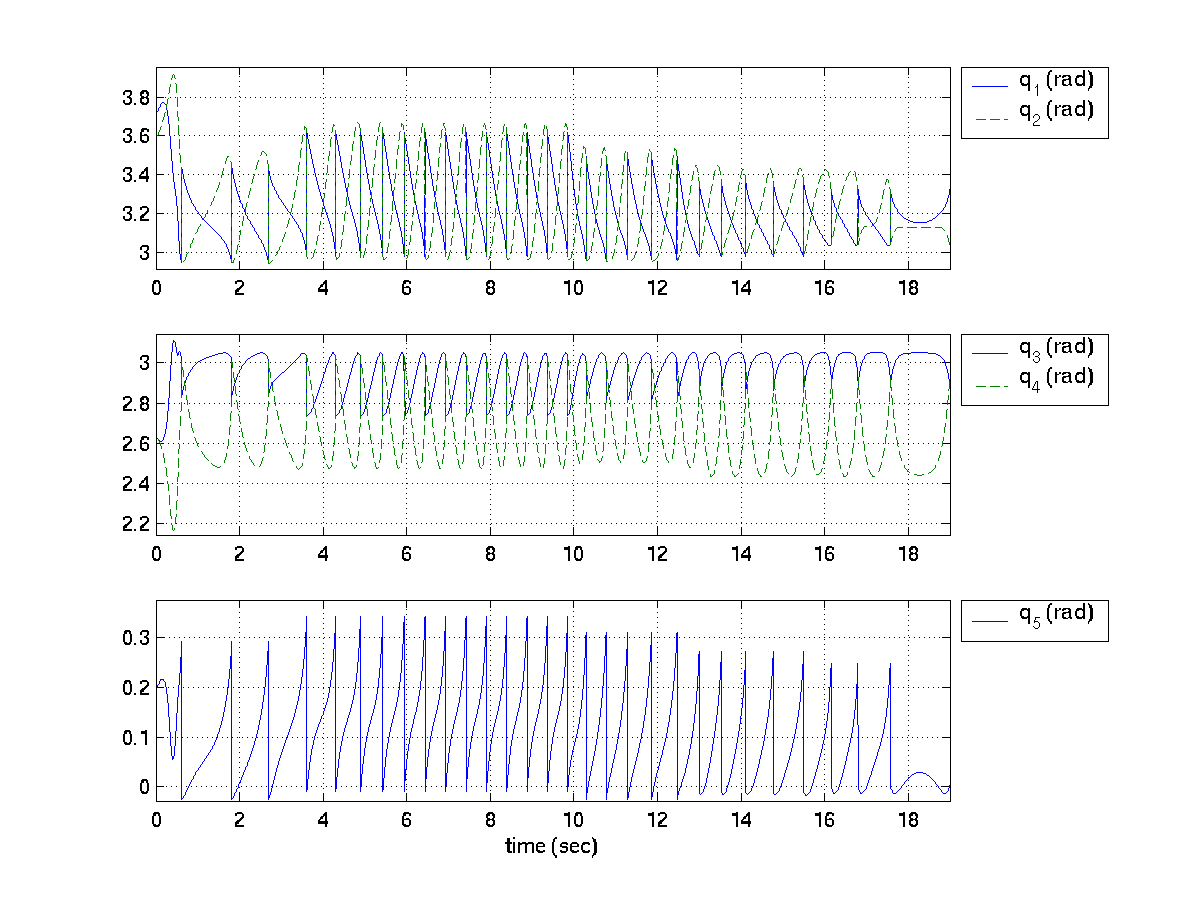
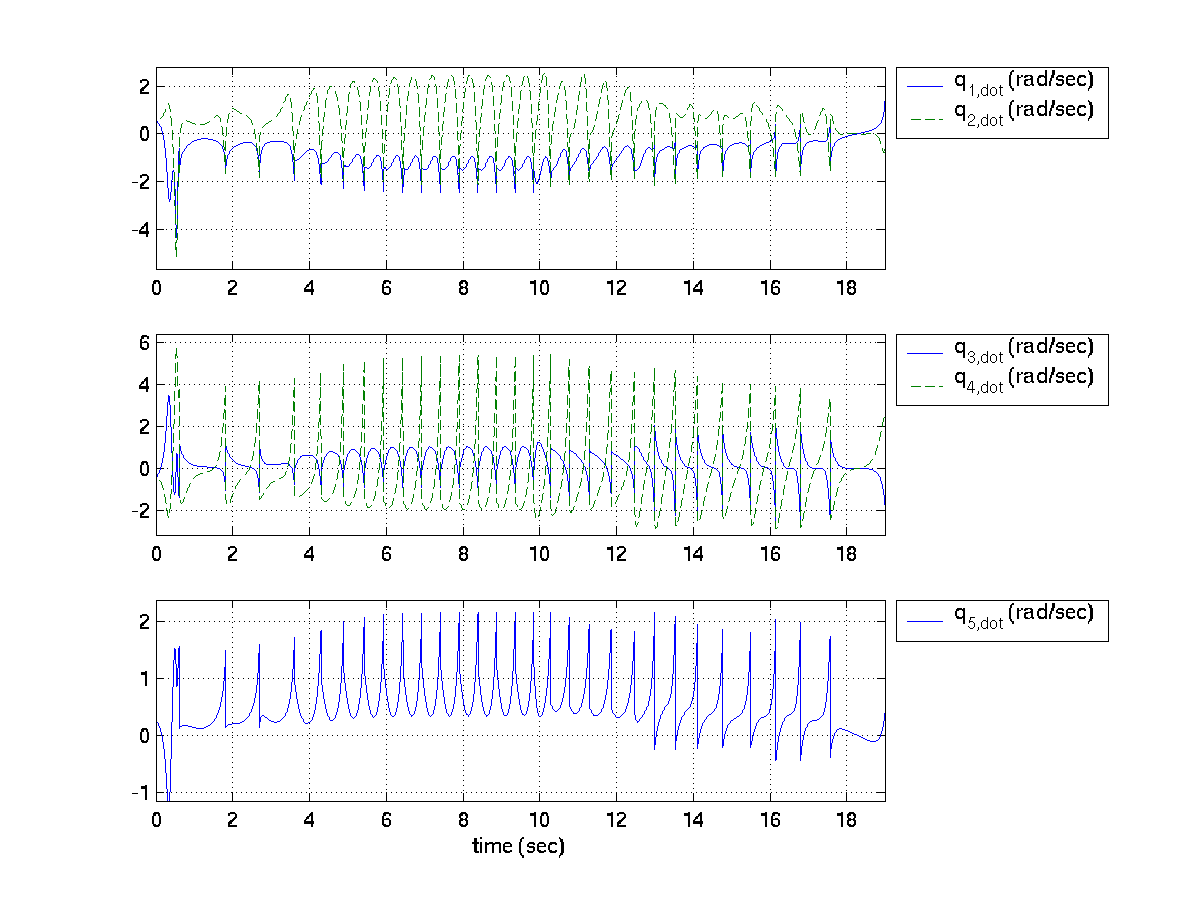
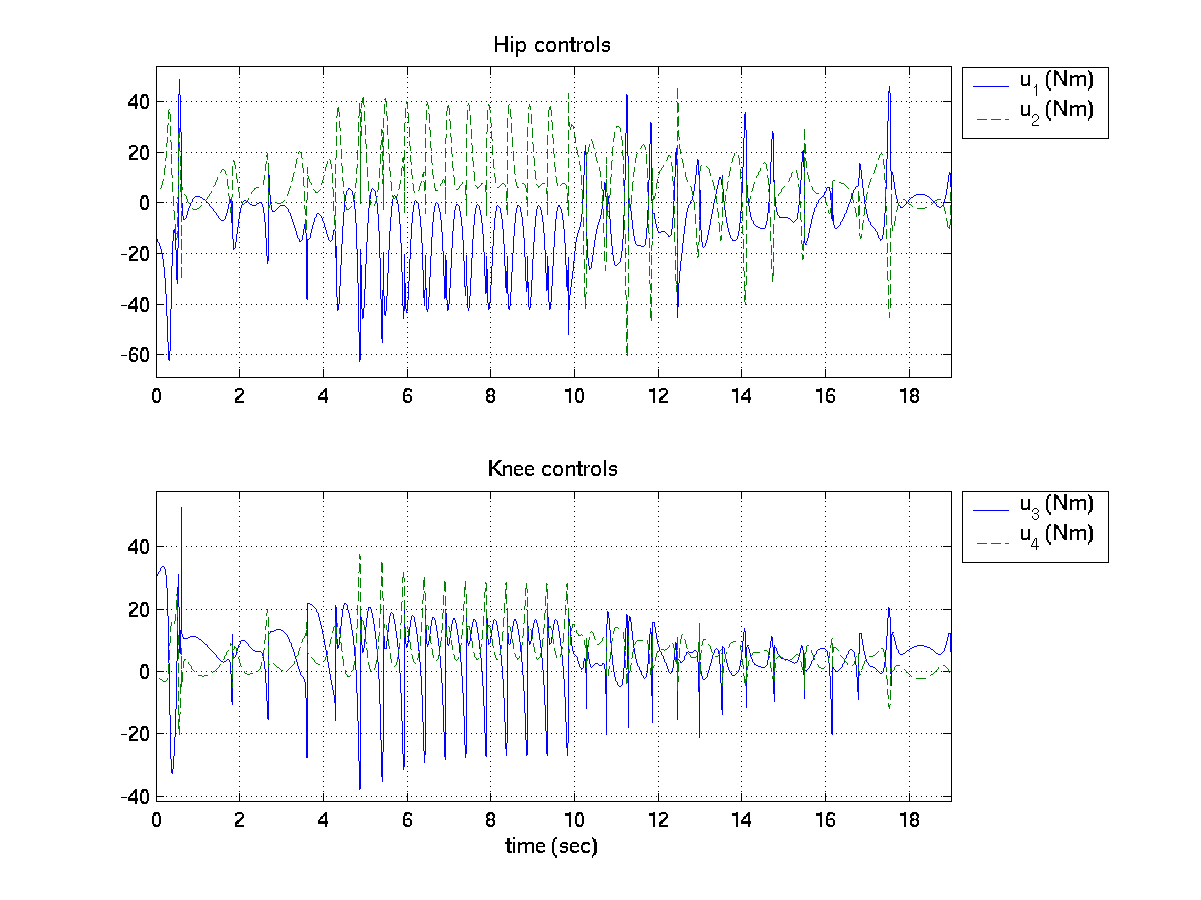
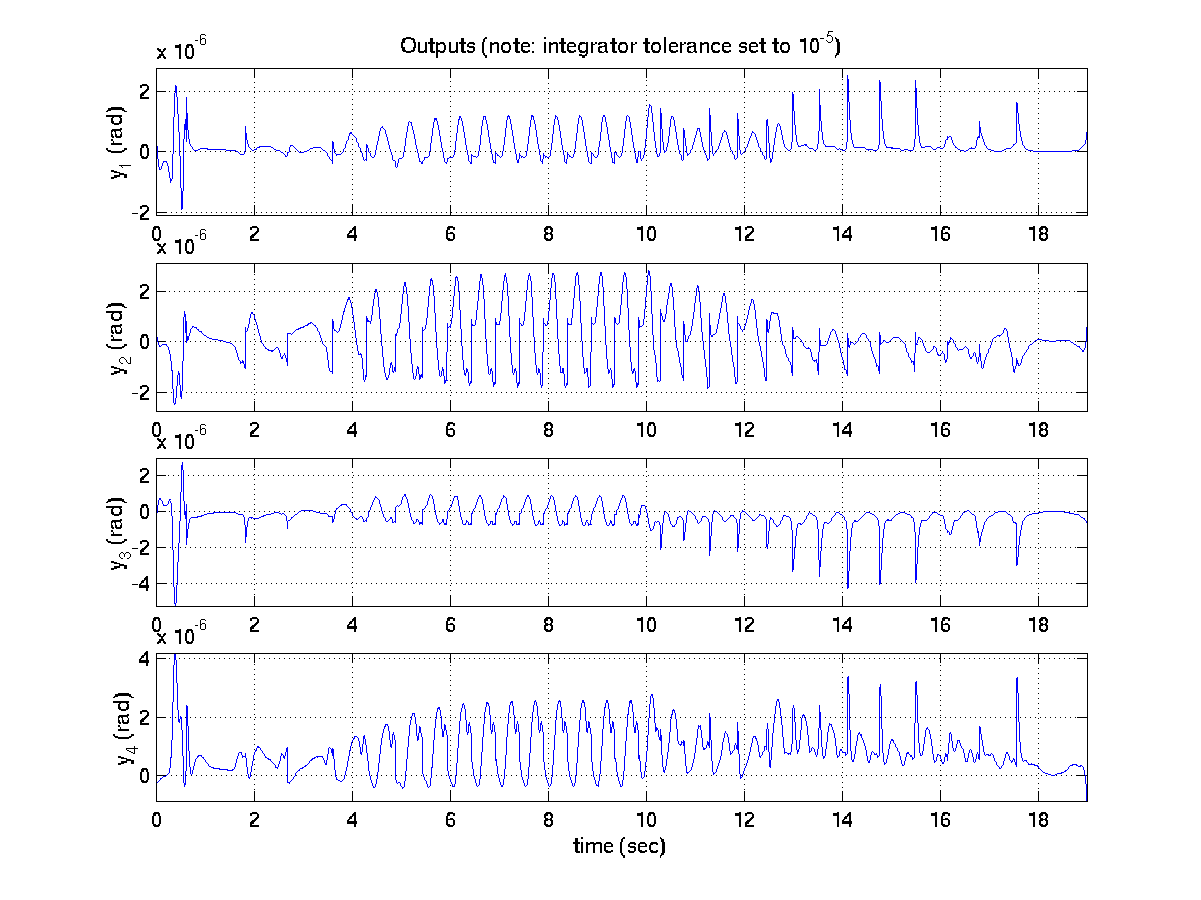
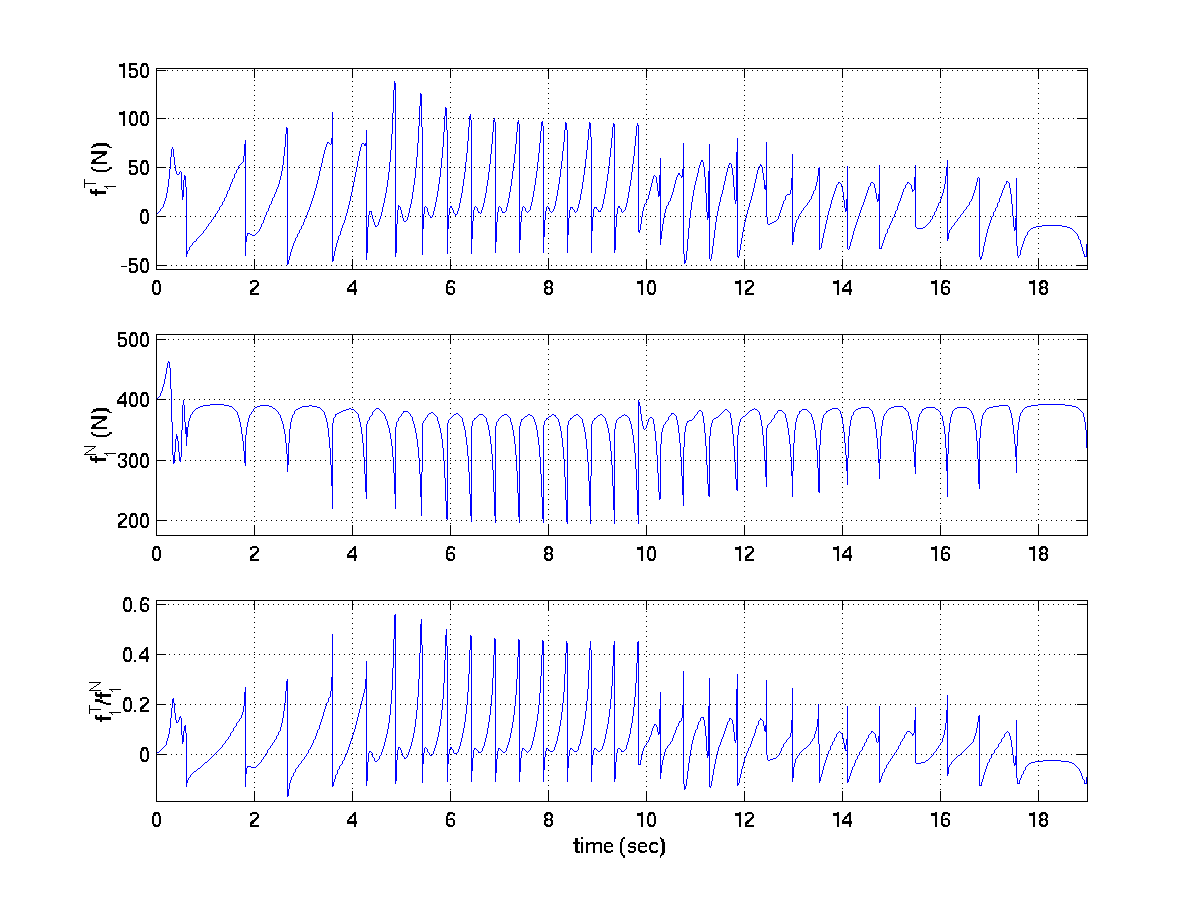
| Plots of various quantities of interest | ||||||||||||||||||||||||||||||
|
| The robot model equation details below are from the IEEE TAC Submission Supplemental Material |