 |
 |
|
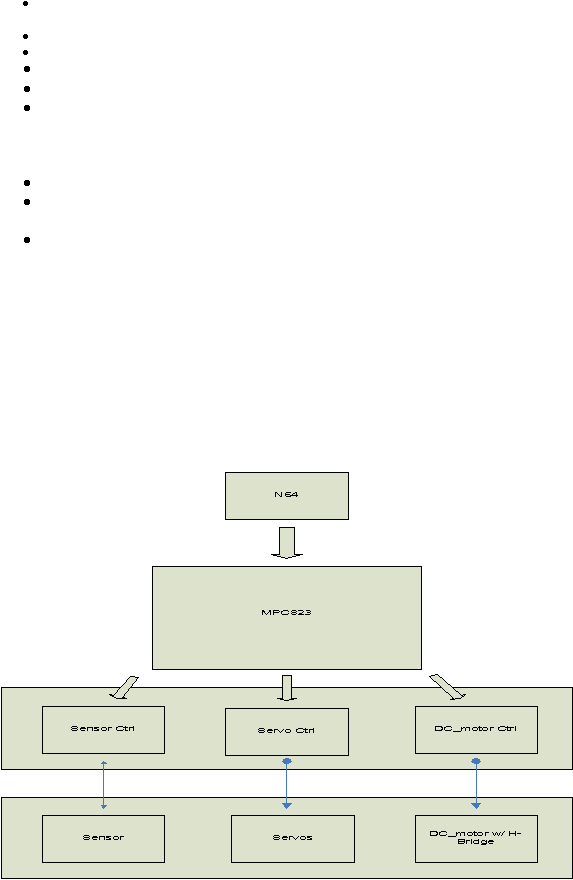
High Level Design
N64 Controller
This is used to control all functionalities of the robot.
Up, Down, Left, and Right buttons: For driving the robot to four different
directions.
C Up and C Down buttons: For rotating the claw
C Left and C Right buttons: For closing/opening the claw
L and R buttons: For rotating a robot body.
A button: For sensor operation w/ rotating a body.
Z button: For Firing.
Servo
Four different servos were used in this project.
One servo for the body : Rotating the body
Two servos for the claw : One for opening/closing the claw, the other one for
rotating the claw
One servo for the gun : Triggering the gun
Instead of using timer to control duty cycle of PWM, we implemented a hardware
controller.
H-Bridge and DC motor
H-Bridge is used to control directionality of motors so that the robot can drive to four
different directions. There are also two dc motor controlled by the H-Bridge and the
hardware.
Ultrasonic Distance Sensor
It measures the distance from the robot to an object which the robot faces to. 5 different
distances will be measured when the robot rotates, once per second.