|
 |
|
Introduction
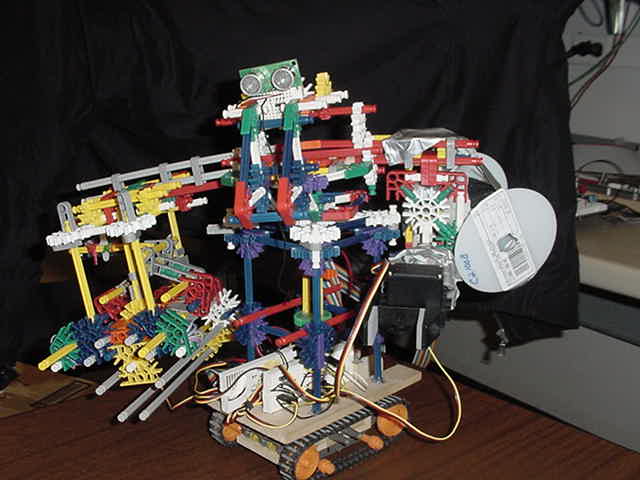
Our project required the following components: an N64 controller, two dc motor with H-
bridge controller, and a robotic body which includes 4 different servos and sensor. The
major functionality of this traveling robot is measuring 5 different distances from it and
shooting to the closest object.