N64 Controller
This is used to control all aspects of the tank. Both analog and digital controls for driving are available to allow for greater range of motion. The other buttons are used for firing, range sensing, and servo control.
H-Bridges
These are used to control directionality of the tread motors and turret so that they can spin in either direction. We also used one for control of the motors on the disc shooter.
Ultrasonic Distance Sensor
Used to determine the distance from the turret to the intended target. Based on the results of this we are able to vary the force with which we fire the discs.
Infrared Distance Sensor
Mounted on the front of the tank to ensure that the tank doesn't crash head on to any obstacles. Since the webcam is mounted on the turret you may not be watching the actual direction you are driving.
Servo
The servo was going to control the position of a visible light filter with respect to the webcam. We implemented the servo controller but due to the high cost of visible light filters we were unable to buy one.
LCD Display
Originally intended to be used as a status display, however due to interfacing difficulties this was never achieved. We did manage to get the LCD working though and drew a picture of a tank on it.
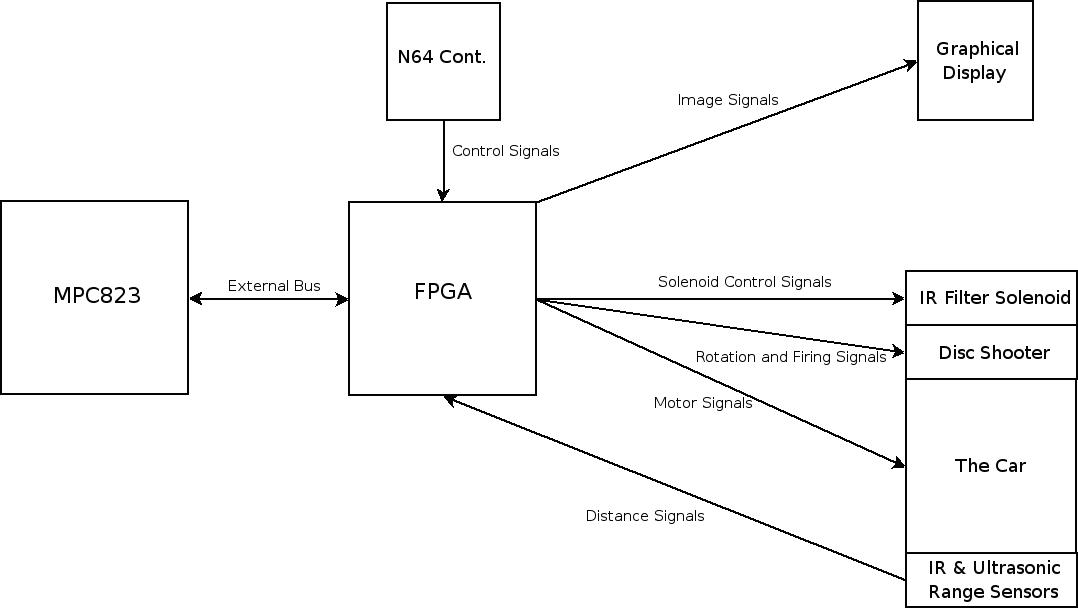
Block Diagram
Introduction
High Level Design
Member Tasks
Hardware Design
Software Design
Results
Conclusions
Media