high level design
hardware
software
results
conclusions
media
work distribution
appendix
Walk the Dog
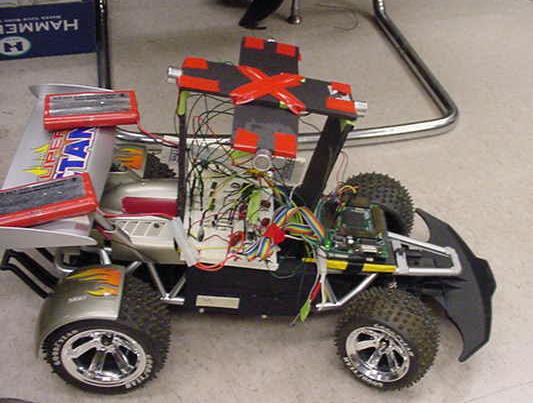
By Matt Fornero and Ryan Pelavin
Walk the Dog is our final project for EECS 373. The goal of the project was to create a self-navigating car, capable of honing in on an ultrasound beacon. The original design document called for IR sensors to perform obstacle avoidance as well. The project was implemented using the MPC555 for car control, and one of the RC cars from the lab, with the steering servo replaced. The project name comes from the ultimate implementation of the design; in which one can "drag" the car around using an ultrasonic beacon.