Overview
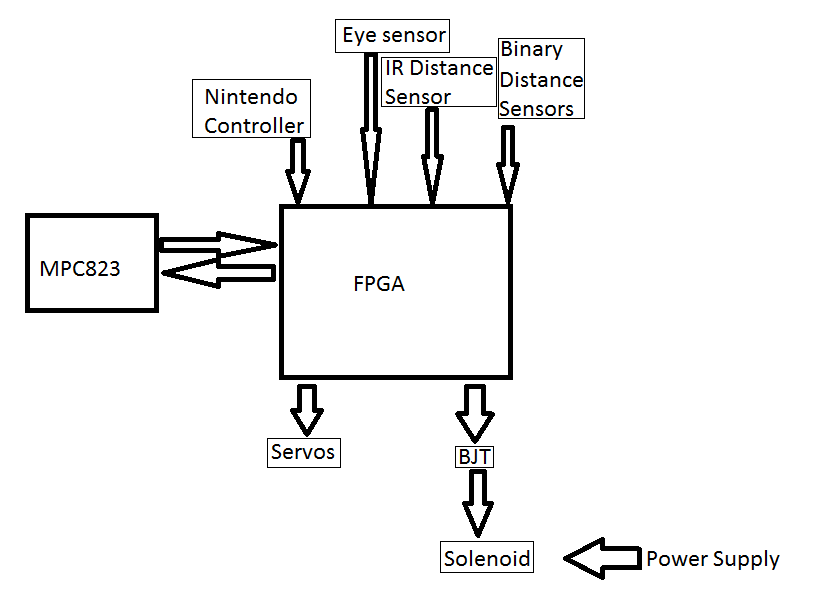
Our project design consisted of a car propelled by two servos using a photosensor, binary distance sensor, and three infrared distance sensors to take input for navigation. The photosensor is mounted on a rotating servo and is used to scan a 90 degree angle in front of the car to search for an LED beacon.
Solenoid-powered cannons were mounted in the left and right arms of the car to shoot obstacles out of the way.
The car's decision path was to rotate until it found the beacon, and drive towards it. If an obstacle is detected in front of the car, the car will attempt to shoot it out of the way. After expending its ammunition, the car will navigate around subsequent obstacles. If the car is driving and gets too close to an obstacle or detects the edge of the table, an interrupt occurs to take over navigation to ensure that the car isn't damaged or halted.
{kind=link}
Member Task Distribution:
Team Effort:
Navigation software
System Integration
Dom David:
Servos
Distance/Light Sensors
Software Drivers
Car assembly
Ross Johnston:
N8 Controller
Project Website
Mang-Git Ng:
Solenoids
Car assembly
Sensor diode circuitry