High Level Design
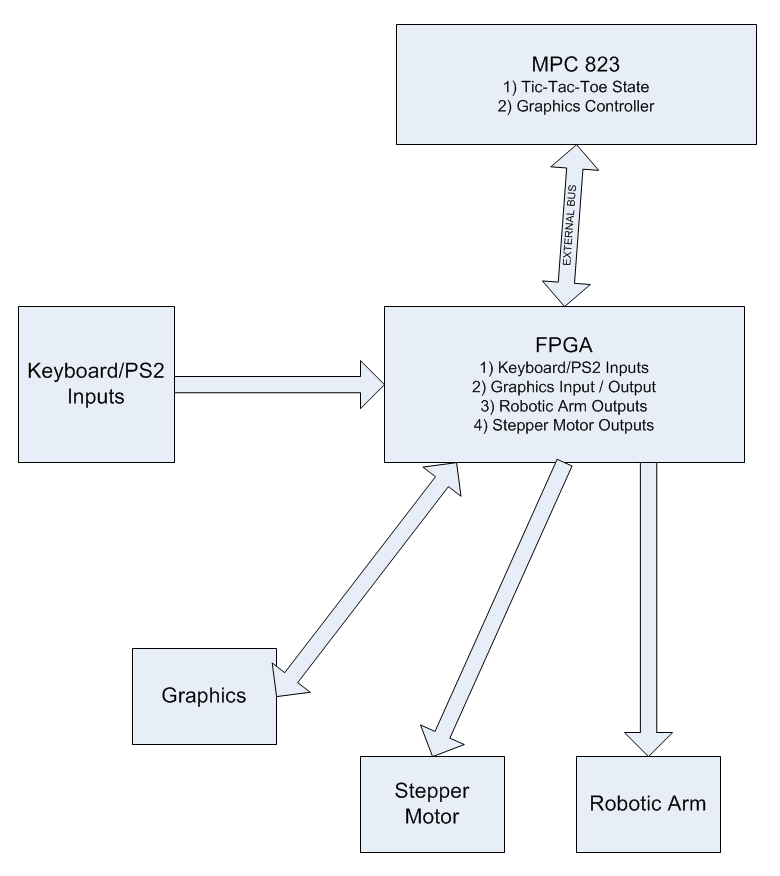
We used a standard QWERTY keyboard in order to send commands to the
FPGA as the DDR pad was broken. From there, we had a small graphics controller which would
display the state of the game. The robotic arm was used to move
pieces from one place to another, however, while the robotic arm
could move in the Y and Z direction, it could not move in the X
direction. Therefore, we used a stepper motor in order to move the
robotic arm to the correct location.
 Components
Components
 Functional
Diagram
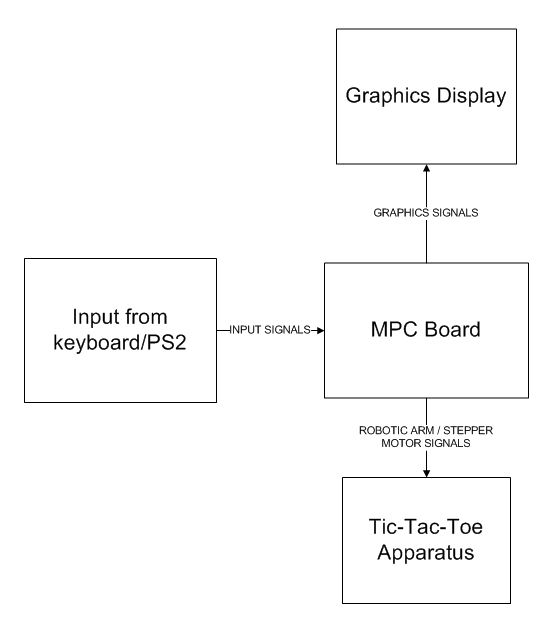
Functional
Diagram