

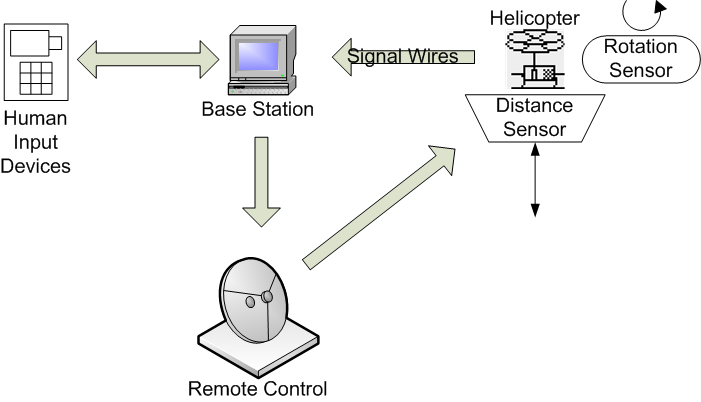
Base Station
All of the peripherals, sensors, and control were interfaced to a central base station hosting all of the processing electronics.
Altitude Adjustment
To begin with, we measured the current altitude of the helicopter at any time instant. Our goal was to have the helicopter stay at one particular altitude, which we could change dynamically during runtime. We decided how much throttle to apply based on a sum of the rate of change of, current, and previous history of the error in the altitude from our desired altitude (PID-control).
Rotational Velocity Adjustment
Next, we measured the rotational velocity of the helicopter. Our goal here was to avoid having the helicopter spin. Again, we used a sum of the rate of change of, current, and previous history of the helicopter's rotational velocities to determine how much yaw control was needed to keep the helicopter from spinning.
Remote Control
In order to reduce the number of cables runninng between the helicopter and base station, we tapped into the original two-channel remote control unit that came with the helicopter. This provided the means of communicating from the base station to the helicopter.
Signal Wires
As we did not have time to implement a wireless bridge connection using technology such as ZigBee or Bluetooth, information being relayed from the helicopter back to the base station was transmitted on copper wires. Additionally, a function of the distance sensor required a signal to be sent periodically from the base station.
Human Interface Devices
Numerous input devices were employed to allow automatic adjustment of the yaw and throttle controls by the base station, manual adjustment by a human user, as well as various other functions. Output devices were also attached to allow for a human user to see what state the helicopter was currently in, as well as replay simulations of test flights.
Logging Data
A mechanism for transmitting the flight path of the helicopter from the base station to a personal computer was added to facilitate tuning of the helicopter's control systems.