A
smart kart which is designed to find
his way to the
destination marked by LED source and also clear all the obstacles on
the way by remove them with the automatic arm and clamp.
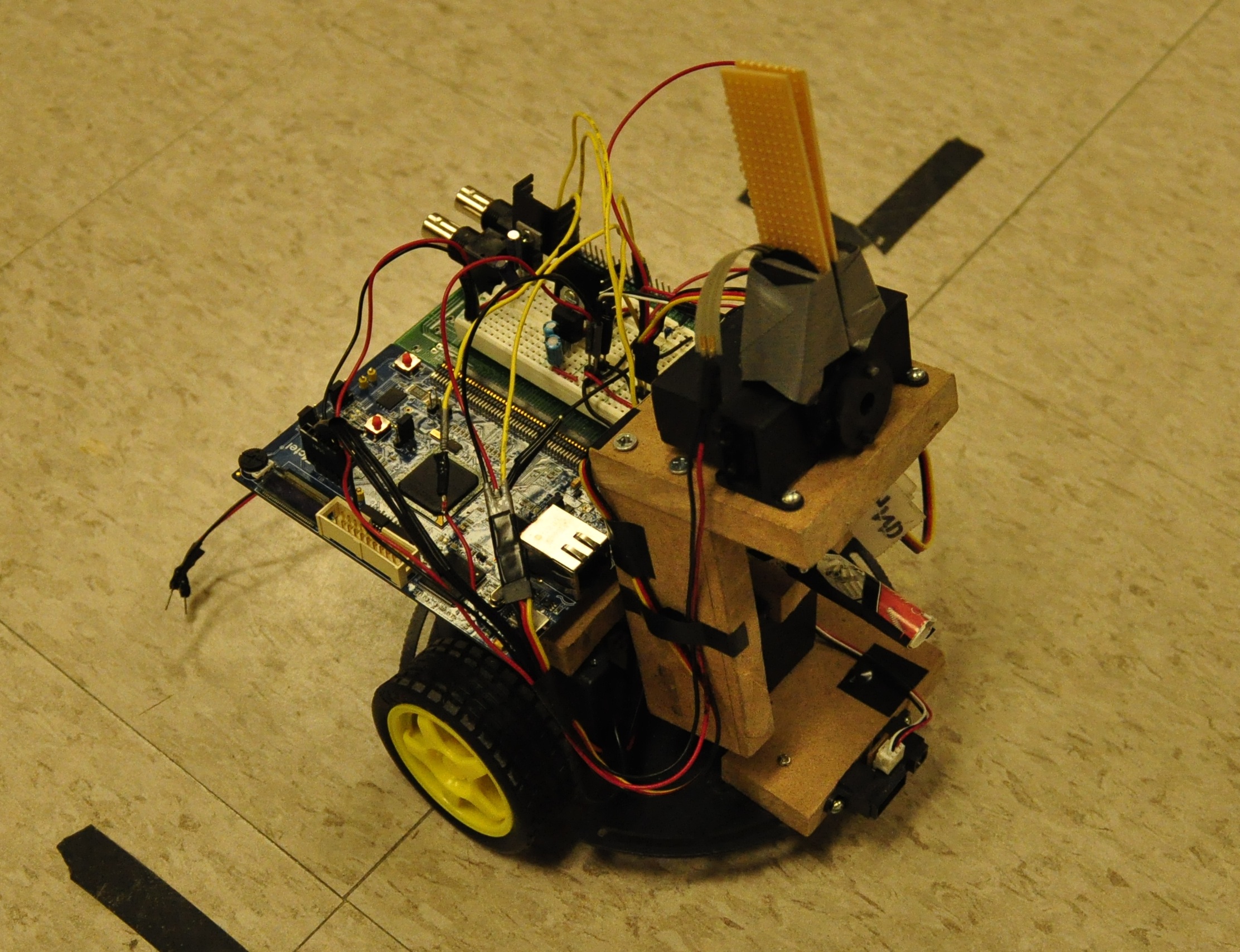
The goal of the project is
to construct an automatic kart that can detect and pickup obstructions
in its way, examples of real life applications might be explosive or
hazardous waste removal. The kart will use a photo-resistor
to detect its destination and detect obstructions through a infrared
distant sensor. A clamp powered by two servos will secure the
obstruction and lift it above the kart to be repositioned out of the
karts way. If the kart fails to secure the obstruction, an alternate
mode can be triggered for manual control of the kart.
High Level Design
Member Task Distribution
Alex and Roy:
Building, Testing, Designing, and Programming
(P.S this means we always build up things together. )