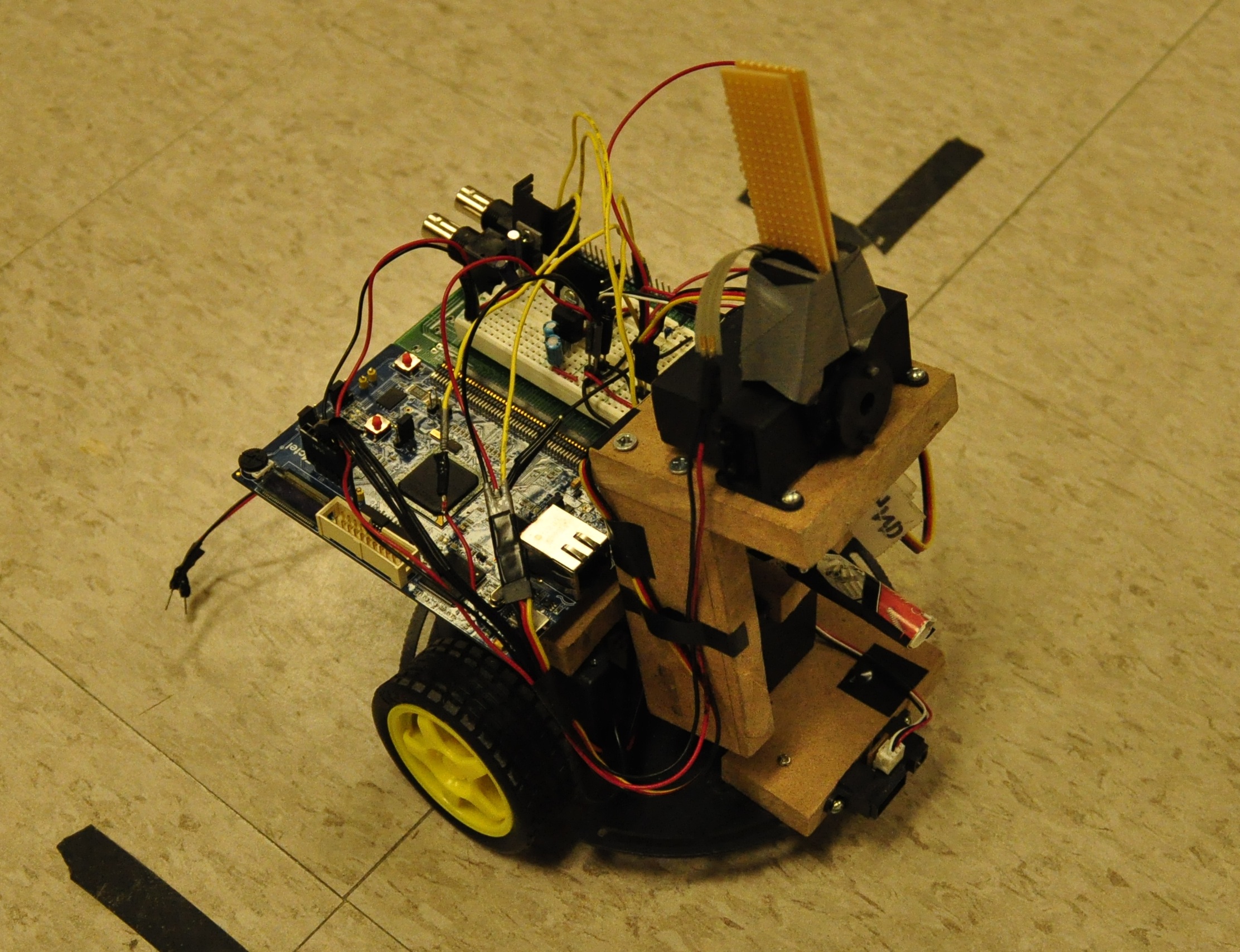
Motor
We use two motors on our kart to drive
each wheel. They are powered and controlled via one component called
H-Bridge. It's a complex op-amp which separate the control signal and
the power supply of the motor. The control signal directly comes from
the FPGA we edited on board to generate the specific PWM signal. Thus
we can easily control the behavior of the two motors by software which
runs on micro-processor, and then we can control the movement of the
kart.
Servo
We have two servos on kart. One is for
the clamp to grab the obstacle tightly and one is for arm to pick up
and lay back. The PWM signal is generated also from the FPGA on board
controlled by the micro-processor via APB bus.
Distance Sensor
The distance sensor is fixed in the front of the kart to
detect if there's obstacle in the way. And another function is to
detect the exact orientation and distance of the obstacle while our
kart is trying to pick it up. The data is transmitted to the processor
via Analog-to-Digital Convertor(ADC).
Pressure Sensor
The pressure sensor is laid on the clamp and it works to
tell the processor whether the clamp is really grabbing something. If
yes, the arm will work to lift it. If no, we'll conduct another search.
Photo-resistor
The Photo-resistor is
place in the front of the kart but above the distance sensor to catch
the light better. The resistor is oriented right to the front and we
also add a paper shade to ensure it is only affected by the light right
ahead of the kart.
Controller
Using push buttons, a simple circuit is constructed such that
if a button is pressed, it would generate a 3.3 V input to a standard
GPIO pin, this would signal what the kart should do in manual mode.