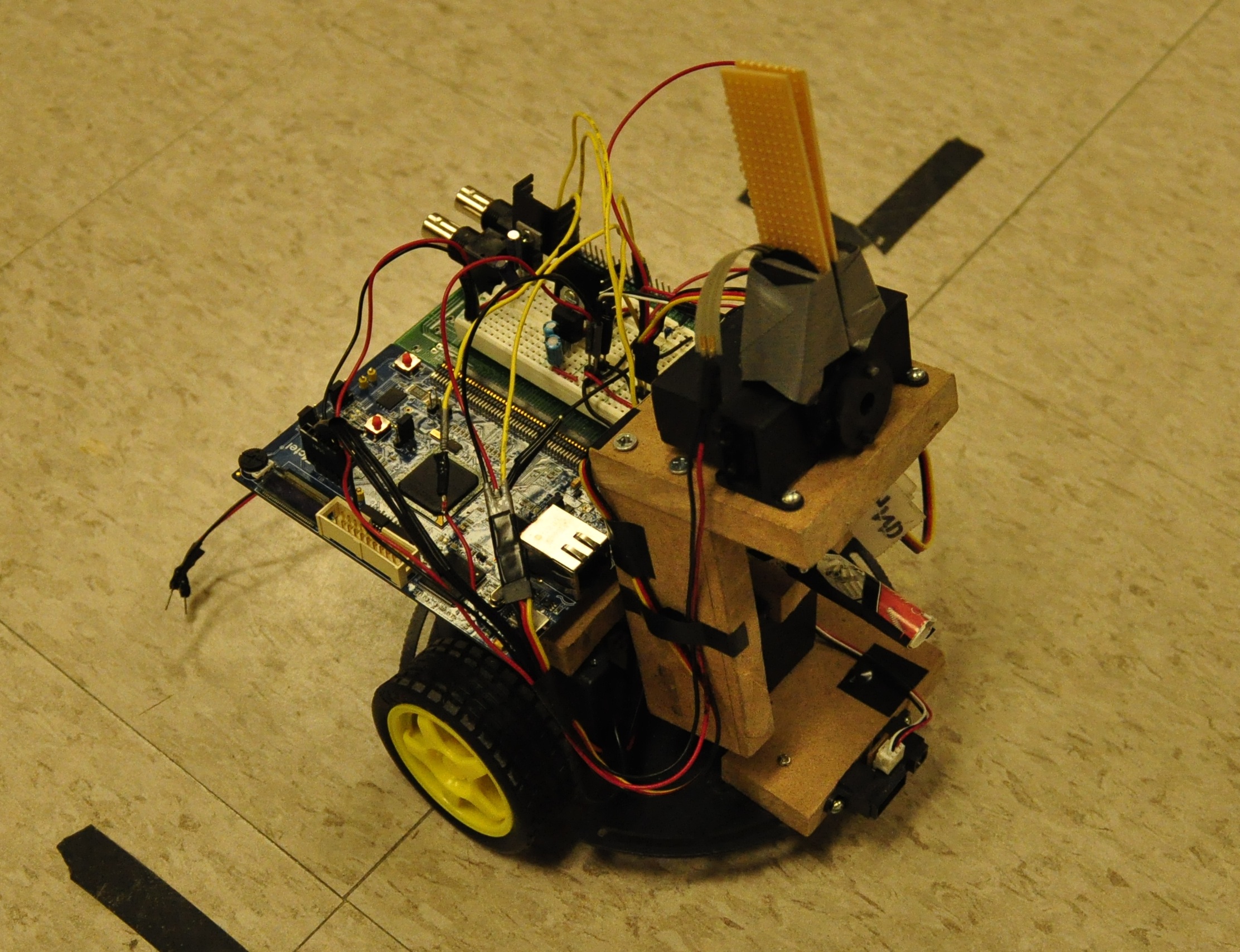
A
smart kart which is designed to find
his way to the
destination marked by LED source and also clear all the obstacles on
the way by remove them with the automatic arm and clamp.
The software
flowchart is as follows:
1. Determine direction of kart using sensor data from
photosensor.
2. Proceed towards destination
3. Check for obstruction along the way
4. If obstruction is found, attempt to pick up.
5. If successful, search for destination again, else if
attempt to pick up again
6. If attempted 3 times and failed, switch to manual mode
7. Search for destination again to reposition the kart