#include <points.H>
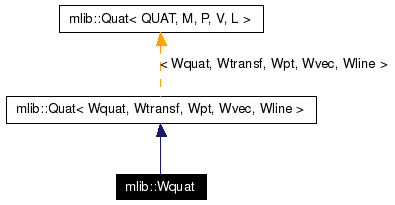
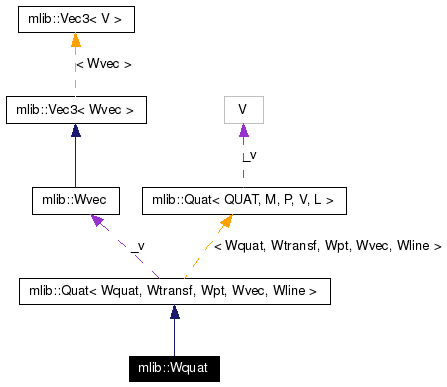
Inheritance diagram for mlib::Wquat:
Public Member Functions | |
| Quat () | |
| Default constructor. Creates a quaternion with a unit scalar component and a default constructed vector component. | |
| Quat (const Wvec &v, double w) | |
| Constructor that creates a quaternion with the scalar and vector components specified in the arguments. | |
| Quat (double w) | |
| Constructor that creates a quaternion with the specifeed scalar component and a default constructed vector component. | |
| Quat (const Wvec &v) | |
| Constructor that creates a quaternion with the specified vector component and a zero scalar component. | |
| Quat (const Wtransf &t) | |
| Create quaternion from rotation matrix. | |
| Quat (const Wvec &v1, const Wvec &v2) | |
Create quaternion to rotate from v1 to v2. | |
| const Wvec & | v () const |
| Accesses the vector component. | |
| Wvec & | v () |
| Accesses the vector component. | |
| double | w () const |
| Accesses the scalar component. | |
| double & | w () |
| Accesses the scalar component. | |
| double | norm () const |
| Wquat | conjugate () const |
| Wquat | inverse () const |
| Wquat | normalized () const |
| double | dot (const Wquat &q) const |
| Wquat | operator+ (Wquatq) const |
| Wquat | operator * (Wquatq) const |
| Wquat | operator * (double s) const |
| Wquat | operator/ (Wquatq) const |
| Wquat | operator/ (double s) const |
Constructors | |
| Wquat () | |
| Wquat (CWvec &v, double w) | |
| Wquat (double s) | |
| Wquat (CWtransf &t) | |
| Wquat (CWvec &v1, CWvec &v2) | |
Static Public Member Functions | |
| static Wquat | slerp (const Wquat &q1, const Wquat &q2, double u) |
| Spherical linear interpolation. | |
Protected Attributes | |
| Wvec | _v |
| double | _w |
Friends | |
| Wquat | operator * (double s, const Wquat &q) |
| Wquat | operator- (const Wquat &q) |
Definition at line 498 of file points.H.
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
Definition at line 87 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::_v, and mlib::Quat< QUAT, M, P, V, L >::_w. |
|
|
Definition at line 93 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::v(), and mlib::Quat< QUAT, M, P, V, L >::w(). |
|
|
Definition at line 89 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::conjugate(), and mlib::Quat< QUAT, M, P, V, L >::norm(). |
|
|
Definition at line 85 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::_v, and mlib::Quat< QUAT, M, P, V, L >::_w. |
|
|
Definition at line 91 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::norm(). |
|
|
Definition at line 113 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::v(), and mlib::Quat< QUAT, M, P, V, L >::w(). |
|
|
Definition at line 102 of file quat.H. References mlib::cross(), mlib::Quat< QUAT, M, P, V, L >::v(), and mlib::Quat< QUAT, M, P, V, L >::w(). |
|
|
Definition at line 100 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::v(), and mlib::Quat< QUAT, M, P, V, L >::w(). |
|
|
|
|
|
Definition at line 107 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::operator *(). |
|
||||||||||||
|
Create quaternion to rotate from
|
|
|
Create quaternion from rotation matrix.
|
|
|
Constructor that creates a quaternion with the specified vector component and a zero scalar component.
|
|
|
Constructor that creates a quaternion with the specifeed scalar component and a default constructed vector component.
|
|
||||||||||||
|
Constructor that creates a quaternion with the scalar and vector components specified in the arguments.
|
|
|
Default constructor. Creates a quaternion with a unit scalar component and a default constructed vector component. This most likely creates a zero vector as the vector component. So, the quaternion should be the identity quaternion. |
|
||||||||||||||||
|
Spherical linear interpolation.
|
|
|
Accesses the vector component.
Definition at line 74 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::_v. |
|
|
Accesses the vector component.
Definition at line 72 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::_v. |
|
|
Accesses the scalar component.
Definition at line 78 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::_w. |
|
|
Accesses the scalar component.
Definition at line 76 of file quat.H. References mlib::Quat< QUAT, M, P, V, L >::_w. |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
 1.4.4
1.4.4