|
|
 Our remote control car is controlled by two processors, the MPC555 and
MPC823. On the MPC823 end, we have the nintendo 64 controller and the LCD
display. The nintendo 64 controller utilizes button L and R to shoot the
left and right missiles on the car, Z shoots both missiles, the cross pad
moves the turret, the analog stick controls the movements of the car, B turns
on the laser, and start enables and disables the car. The LCD display only
displayed the name of our project since we did not have any useful data to send
to it. It was however fully functional and ready to use. In order to communicate
with the RC car, we initially attempted to implement a wireless RS232 connection
but the unreliableness of the signal left us with a really long ethernet cable
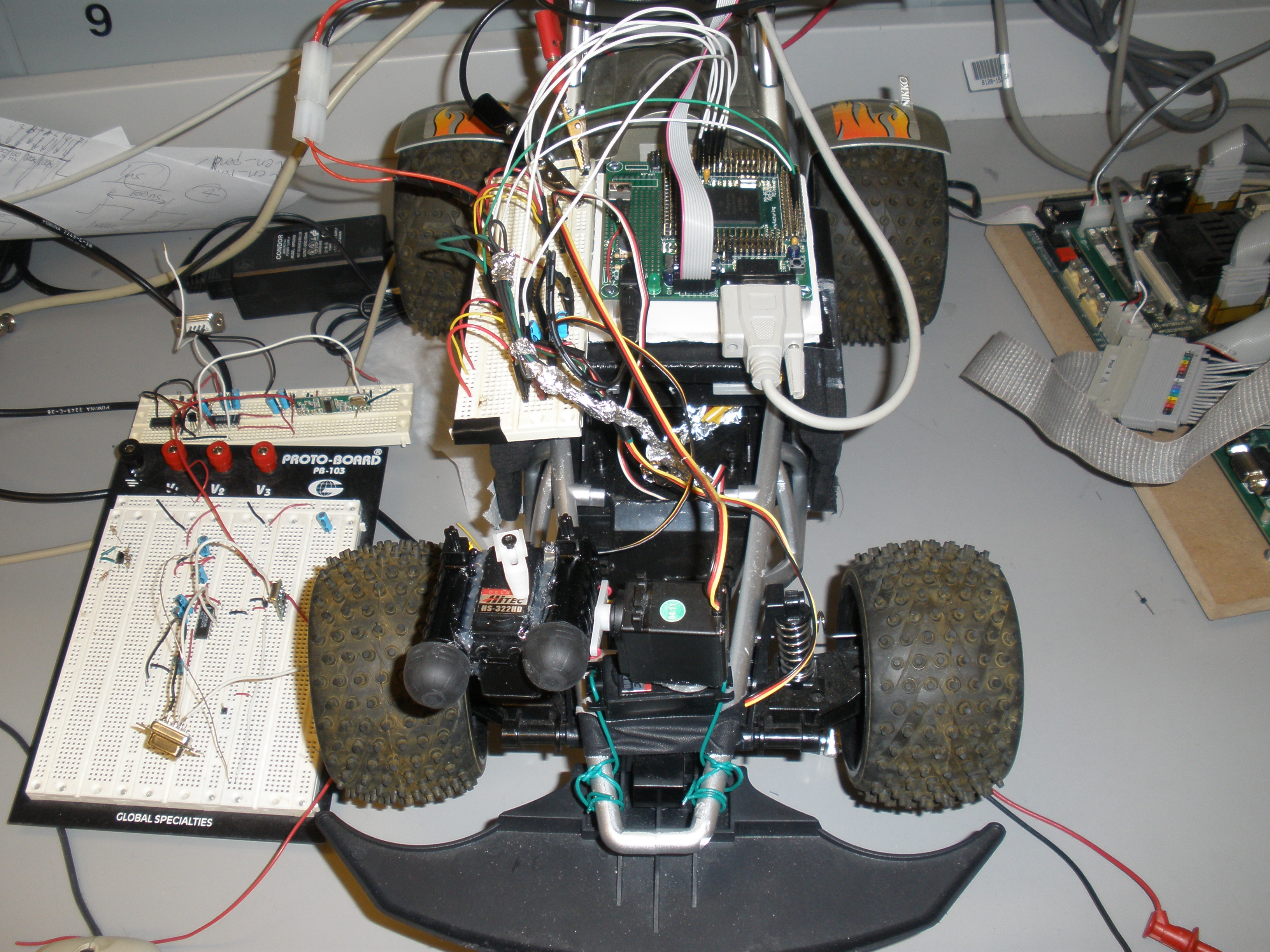
with RS232 DB-9 connectors to transfer signals. On the side with the RC car,
we had the MPC555 decode the 32-bit instructions sent from the nintendo controller
in order to control the movements and turrets on the car. The car consisted of
the MPC555, motors, serveral servo's to control steering as well as the turrets,
and an H-Bridge that allowed us to move backwards. We also implemented a laser
that aided the turrets when it ran out of ammo. The following is a block diagram
of our car.
Our remote control car is controlled by two processors, the MPC555 and
MPC823. On the MPC823 end, we have the nintendo 64 controller and the LCD
display. The nintendo 64 controller utilizes button L and R to shoot the
left and right missiles on the car, Z shoots both missiles, the cross pad
moves the turret, the analog stick controls the movements of the car, B turns
on the laser, and start enables and disables the car. The LCD display only
displayed the name of our project since we did not have any useful data to send
to it. It was however fully functional and ready to use. In order to communicate
with the RC car, we initially attempted to implement a wireless RS232 connection
but the unreliableness of the signal left us with a really long ethernet cable
with RS232 DB-9 connectors to transfer signals. On the side with the RC car,
we had the MPC555 decode the 32-bit instructions sent from the nintendo controller
in order to control the movements and turrets on the car. The car consisted of
the MPC555, motors, serveral servo's to control steering as well as the turrets,
and an H-Bridge that allowed us to move backwards. We also implemented a laser
that aided the turrets when it ran out of ammo. The following is a block diagram
of our car.
|