|
|
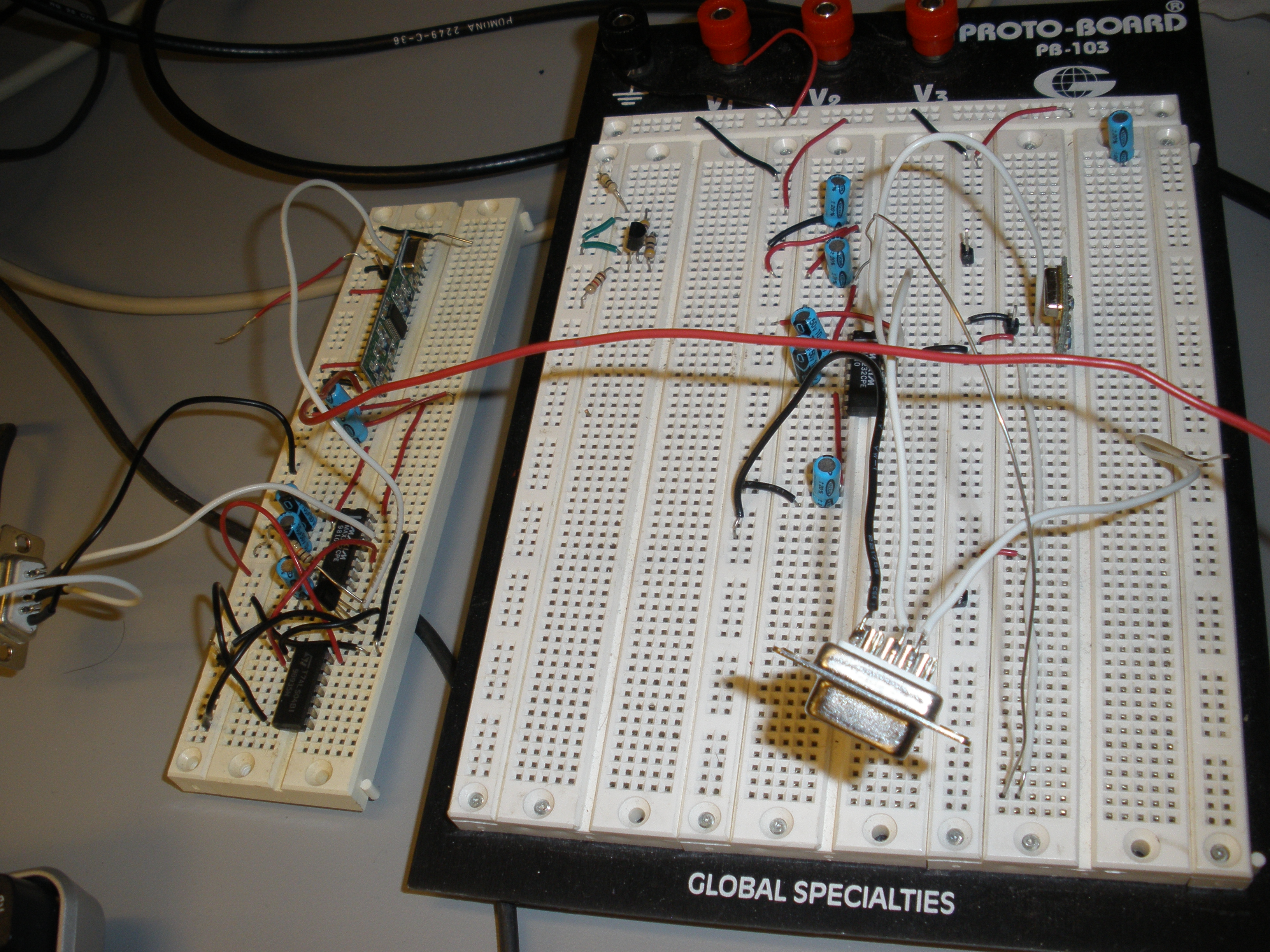 Alan Lee was in charge of the system integration along with the wireless
communication between the MPC823 and MPC555. The system integration involved
decoding 32-bit instructions into PWM signals that drove various servos
and motors on the MPC555. The communication between the MPC823 and MPC555 was
initially drawn out with a serial rs232 wireless devices. After countless
hours of trying to get the wireless signals to work, we resorted to a
really long ethernet cable converted to an rs232 cable with DB-9 connectors.
Alan Lee was in charge of the system integration along with the wireless
communication between the MPC823 and MPC555. The system integration involved
decoding 32-bit instructions into PWM signals that drove various servos
and motors on the MPC555. The communication between the MPC823 and MPC555 was
initially drawn out with a serial rs232 wireless devices. After countless
hours of trying to get the wireless signals to work, we resorted to a
really long ethernet cable converted to an rs232 cable with DB-9 connectors.
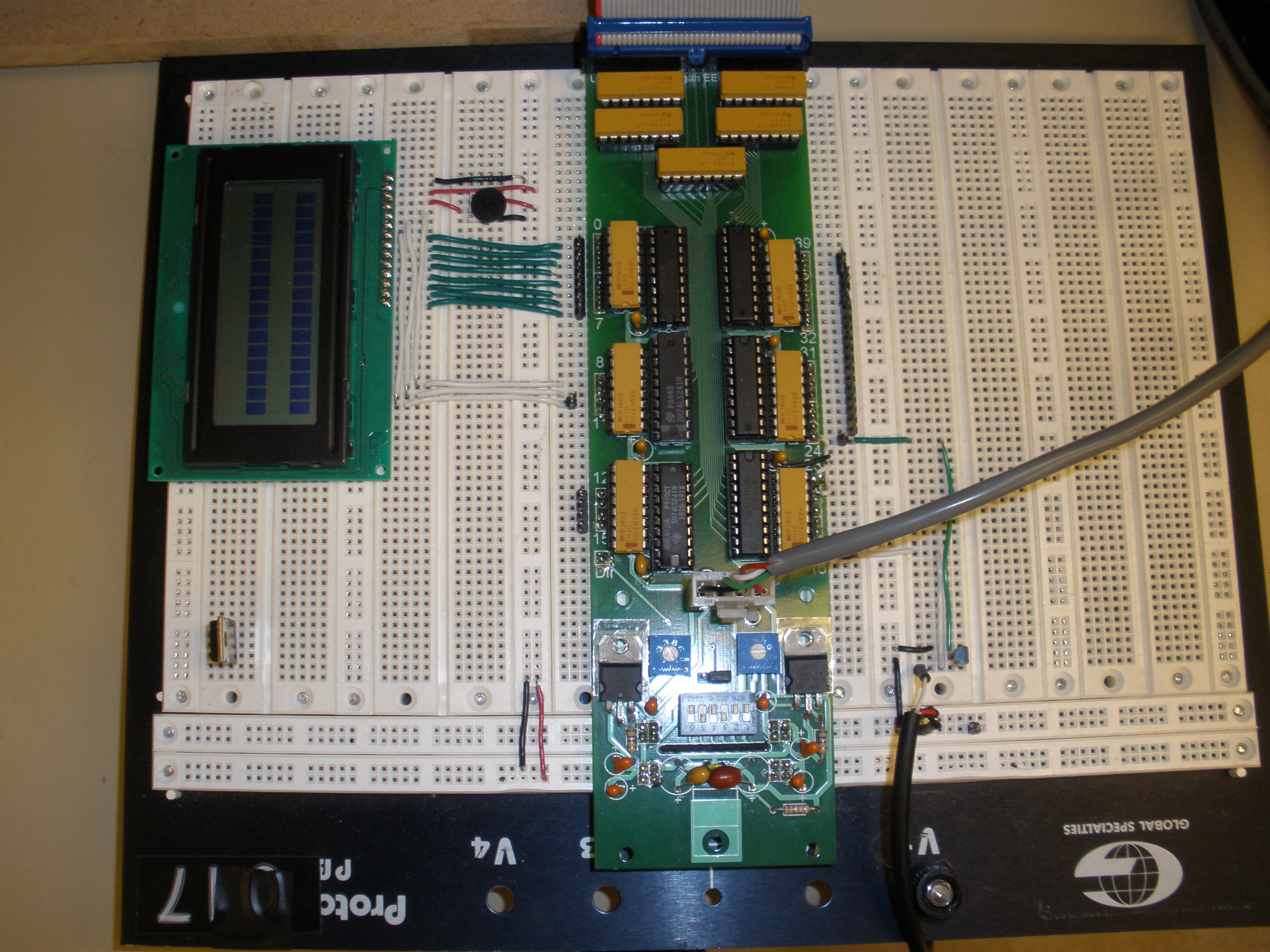 James Shuster was in charge of the Nintendo 64 controller and LCD display.
The Nintendo 64 controller's hardware was completely done in verilog which
enabled us to use the joystick to control the car, the arrow pad to control
the turret, the L and R and Z buttons to shoot the projectiles, and the B
button to enable the laser. The LCD display was implemented for future
usage if desired, although we did not have any meaningful data to display
we proudly displayed our group name of Modulus Prawn.
James Shuster was in charge of the Nintendo 64 controller and LCD display.
The Nintendo 64 controller's hardware was completely done in verilog which
enabled us to use the joystick to control the car, the arrow pad to control
the turret, the L and R and Z buttons to shoot the projectiles, and the B
button to enable the laser. The LCD display was implemented for future
usage if desired, although we did not have any meaningful data to display
we proudly displayed our group name of Modulus Prawn.
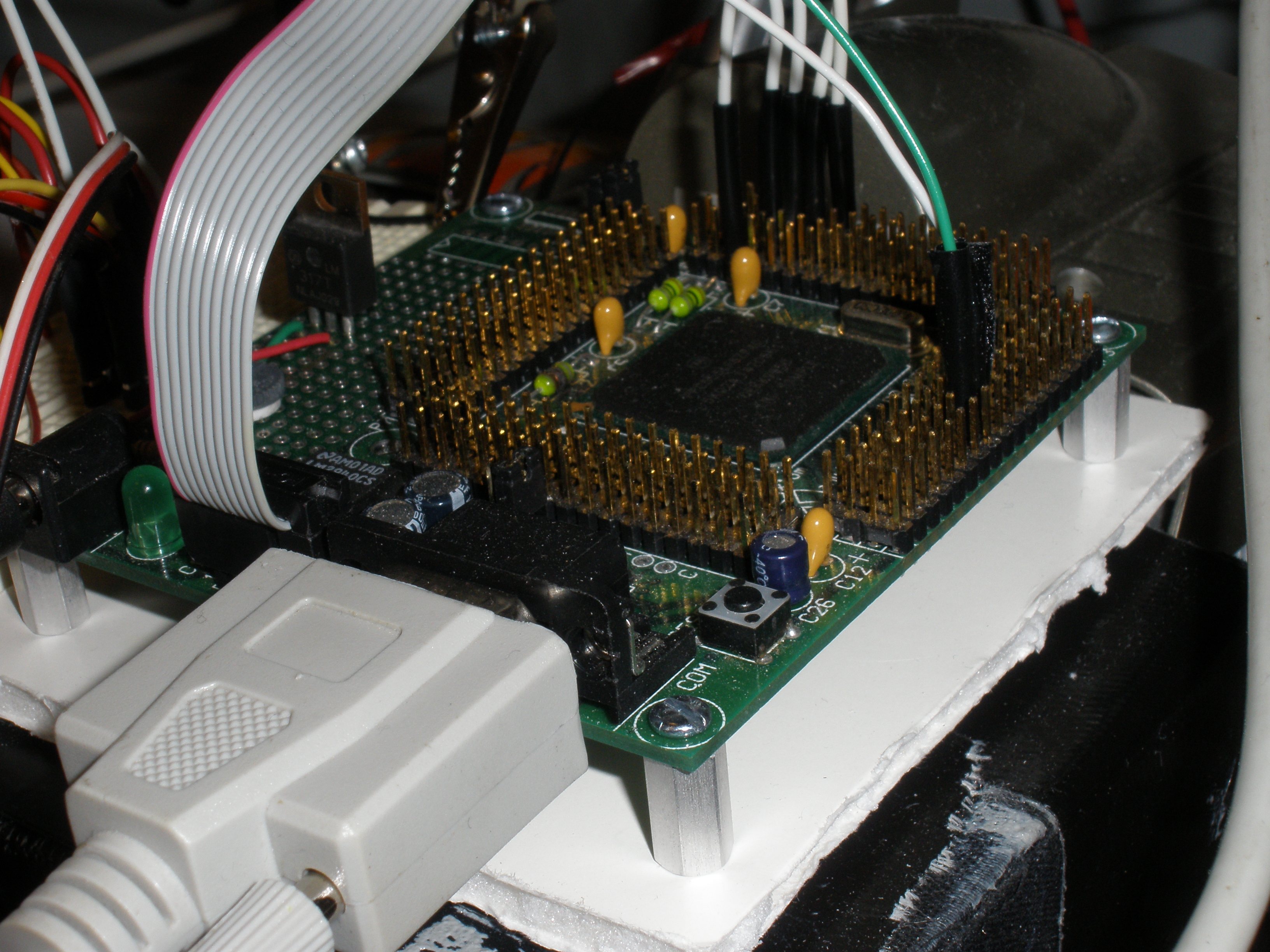 Neil Semedin was in charge of the MPC555 and the hardware parts of the
remote control car. He enabled us to easily integrate all the components with
the MPC555. He assembled the RC car and integrated the H-bridge, servos,
and motors into the car. He also, built the turret which is very sweet! With
his indepth research of the MPC555 and the PWM signal generation function,
it allowed for a semi-smooth integration which put our car on the road
in no-time (well kind of).
Neil Semedin was in charge of the MPC555 and the hardware parts of the
remote control car. He enabled us to easily integrate all the components with
the MPC555. He assembled the RC car and integrated the H-bridge, servos,
and motors into the car. He also, built the turret which is very sweet! With
his indepth research of the MPC555 and the PWM signal generation function,
it allowed for a semi-smooth integration which put our car on the road
in no-time (well kind of).
|